Las pinzas robóticas se hallan en pleno desarrollo buscando opciones alternativas de agarre renovadoras. Es el caso de la pinza acústica del proyecto Schuck, la que es desarrollada en la Universidad de ETH Zurich. A través de ultrasonidos, dejará coger objetos sin manipularlos.
Schuck, la pinza robótica acústica
Marcel Schuck es un científico de treinta y uno años de la Universidad de ETH Zurich. En nuestros días se halla estudiando con los fondos de su ETH Pioneer Fellowship el desarrollo de una pinza robótica a través de tecnología de ondas sonoras. La peculiaridad de este Gripper para robot es que deja coger objetos pequeños y débiles sin la necesidad de tocarlos.
Para qué vale la pinza para robots acústica
El propósito es poder ofrecer al ámbito de la Automatización Industrial nuevas posibilidades de manipulación de objetos. Para esto se hallan explorando los campos potenciales de aplicación en la industria.
Se piensa que servirá de enorme utilidad para muchas empresas de robótica a manipular objetos singularmente de gran valor que sean frágiles y débiles. Ciertas aplicaciones potenciales serían en la industria de la relojería o bien en la fabricación de microchips.
En nuestros días, para no dañar los objetos, se emplean pinzas suaves que son similares al caucho. Son ideales para manipular objetos débiles, más tienen ciertas restricciones de precisión en el posicionamiento aparte de ser contaminantes
Características de Schuck No-Touch Robotics
El proyecto lleva por nombre Schuck No-Touch Robotics y emplea tecnología espacial. Se fundamenta en un efecto que se viene usando desde hace más de ochenta años. Son ondas de ultrasonido que provocan un campo de presión completamente inapreciable para los humanos.
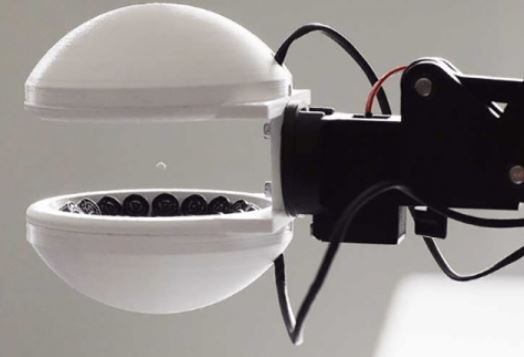
Específicamente hay unos puntos de presión que se producen dado a que las ondas acústicas se sobreponen entre sí. Este movimiento produce que un objeto pueda continuar levitando en el aire. Marcel Schuck espera poder supervisar el gripper electrónicamente por ultrasonido a través de un software que controle por su parte el brazo robótico. Para conseguirlo, ha instalado abundantes altífonos de reducidas dimensiones en las 2 pinzas con forma de esfera adaptadas en una impresora 3D.
Uno de los beneficios que ofrece el sistema de agarre por ultrasonidos es que puede sostener piezas con diferentes formas geométricas sin la necesidad de realizar cambios en el sistema de de agarre.
Indudablemente Schuck es un proyecto renovador para los robots dedicados a la Industria. Por este motivo cuenta con todo el apoyo de la universidad y con los ciento cincuenta francos de la beca que le ha sido concedida. Hoy día procuran inversiones que les dejen agilizar el desarrollo y la escalabilidad de su proyecto.
Descubre además: